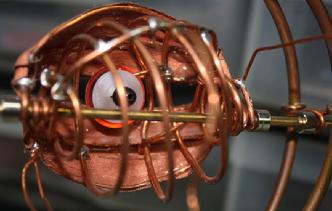
My eyeball project was spawned by a residual interest from the horse robot head project.
The idea was to build a moving eye that follows you around. This metal (stage III) eye is
microcontroller based and follows a script. I am still perfecting the sonar tracking part.
|
The unit is servo controlled with 3 axis (up / down / left / right / lid open & lid close) of articulation.
|
|
Preliminary stage II made of wood.
It has 2 axis control
(up / down/ left & right).
I made a parallel controller so that
both axis's can be simultaneously controlled.
| |
|
Preliminary stage one unit made from foam.
It has manual 3 axis servo control.
(left / right / lid open / lid close / iris open & iris close)
I control it with 3 separate analog
pulse width modulation (PWM) control units.
| |
|